Układ zasilania oraz sterowania dla urządzeń załadowczych skipów w przedziale południowym szybu I na poziomie 1090 JSW KWK Budryk
Do sterowania klapami wsypowymi oraz klapą przerzutową pod zbiornikami załadowczymi, zostały zastosowane rozdzielacze elektropneumatyczne.
Do kontroli poziomu urobku w kieszeniach załadowczych oraz zbiorniku retencyjnym zostały zabudowane przekaźniki radioizotopowe.
Przedstawione rozwiązania kontroli poziomu urobku w kieszeniach załadowczych umożliwiają identyfikację trzech poziomów:
– brak urobku w kieszeniach załadowczych, obecność urobku w zbiorniku retencyjnym, kieszenie załadowcze przepełnione.
Własności funkcjonalne układu sterowania załadunkiem skipów:
- zapewnia trzy rodzaje sterowania:
- automatyczne – ze sterownika centralnego,
- zdalne (ręczne) z pulpitu sygnalisty podłączonego do sterownika centralnego,
- lokalne ze stanowiska obsługi przenośnikiem taśmowym, przenośnikiem zgrzebłowym, klapami (pulpit sterowniczy lokalny),
umożliwia następujące rodzaje pracy: - transport urobku,
- pracę w trybie remontowym (rewizja),
- umożliwia współpracę z układem sygnalizacji szybowej,
- zapewnia wyłączenie awaryjne z każdego miejsca wzdłuż trasy ciągu przenośników za pośrednictwem wyłączników awaryjnych,
- zapewnia ponowne uruchomienie ciągu po awaryjnym zatrzymaniu – po skasowaniu awarii,
kontroluje pracę za pomocą następujących czujników: - spiętrzenia urobku,
- temperatury,
- ruchu taśmy,
- przeciwpożarowych,
- poziomu urobku w zbiornikach załadowczych,
- poziomu urobku w zbiorniku retencyjnym,
- położenia klap wysypowych oraz klapy przerzutowej,
- zamknięcia/otwarcia zasuwy bezpieczeństwaciśnienia powietrza w instalacji pneumatycznej i hydraulicznej.
- umożliwia sterowanie klapami oraz zasuwą za pośrednictwem rozdzielczy elektropneumatycznych i elektrohydraulicznych,
- umożliwia ważenie porcji urobku transportowanej do skipu poprzez wagi zabudowane na przenośniku taśmowym,
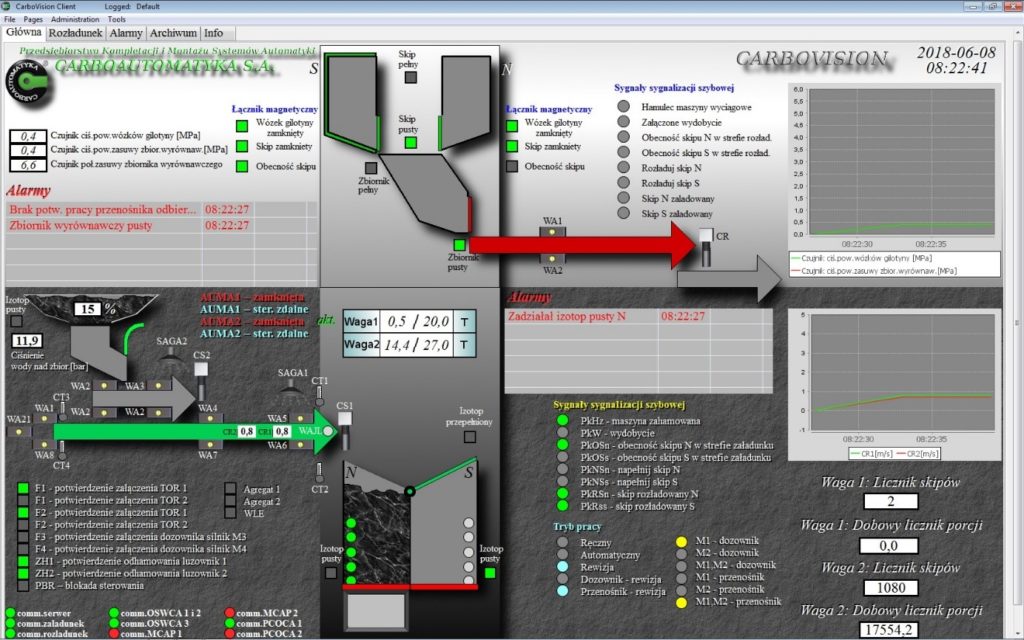
- umożliwia współpracę układu z systemem wizualizacji.